

Neue Erfindung
Weicher Roboter aus Linz springt, trägt Dinge und läuft ultraschnell
Das umgekehrt u-förmige System lässt sich mit angelegter Elektrizität so präzise ansteuern, dass es Hindernisse überwinden, Gegenstände tragen und Wege "ultraschnell" zurücklegen kann, wie es das Team im Fachblatt "Nature Communications" ausdrückt. Mit dieser Art der Roboter hat man noch einiges vor.
An der Erweiterung des vorherrschenden Bildes von aus hartem Material gefertigten Maschinen arbeiten die Forscher von der Abteilung "Physik der Weichen Materie" und dem "LIT Soft Materials Lab" der Universität Linz. In den vergangenen Jahren wartete man u.a. mit einem neuartigen Biogel auf, das dehn- und biegbar, sowie ausreichend stabil ist, um mit elektronischen Bauteilen zu einer Art weicher Roboter kombiniert zu werden. Die Gruppe zeigte, dass derartige Systeme oder Aktuatoren auch durch Magnetfelder zu sehr raschen Bewegungen angeregt werden können, oder stellte auch ein biologisch abbaubares Biogel vor.
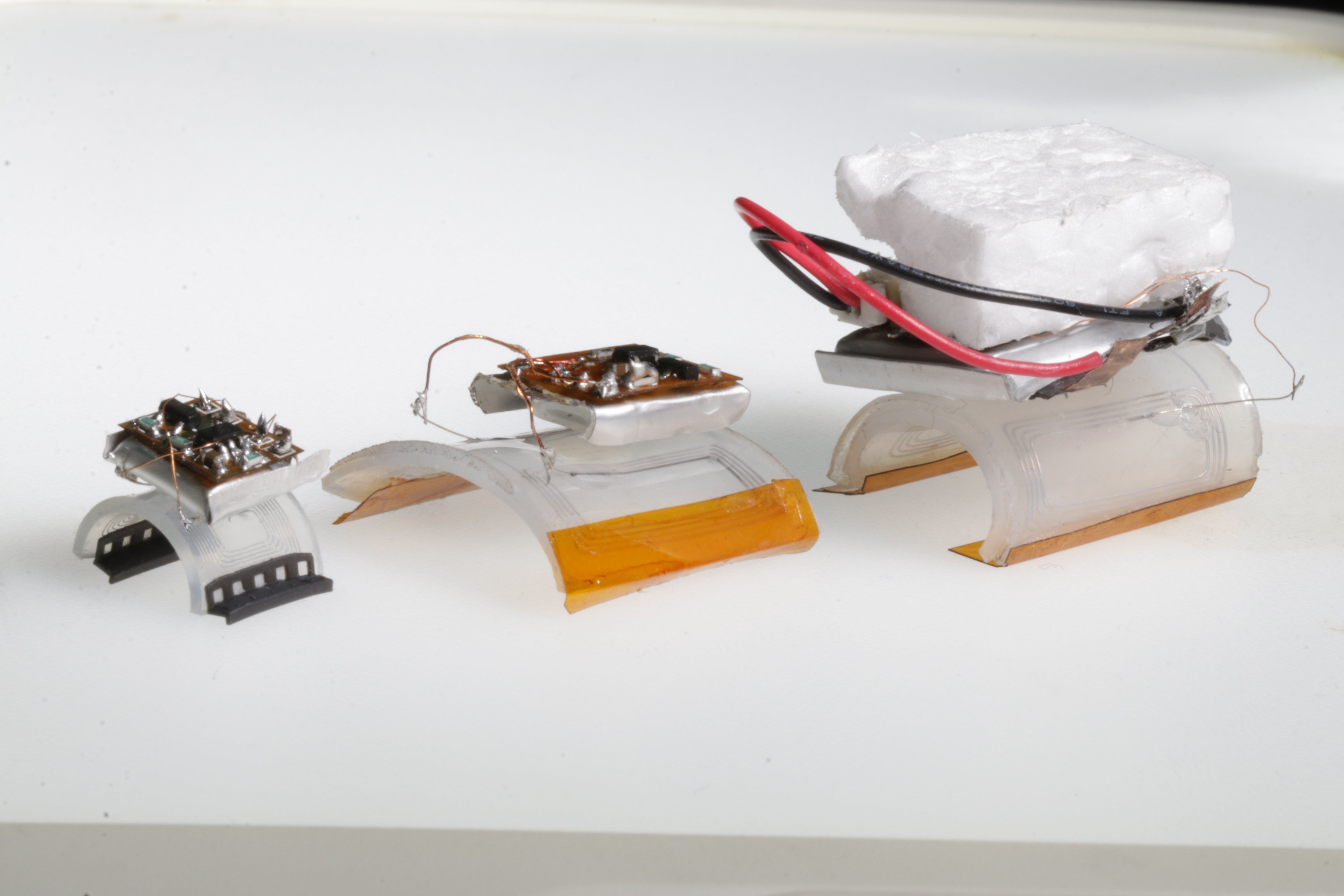
Der Grundgedanke dahinter ist immer, die Voraussetzungen zu schaffen, damit Roboter und Mensch künftig enger miteinander interagieren können, ohne dass die starre Maschine dem Menschen körperlich schadet. Nun hat das Team um Erstautor Guoyong Mao einer seiner Entwicklungen im nahezu wörtlichen Sinne Beine gemacht: Das kleine mehrlagige rechteckige Gebilde aus verformbaren Kunststoffen (Elastomeren) hat neben einer gedruckten Kanalstruktur gefüllt mit flüssigem Metall in seiner Mitte auch "Füßchen" an seinen beiden kurzen Enden.
Der in einem speziellen 3D-Drucker hergestellte Aufbau hat zur Folge, dass sich das System u-förmig wölbt. Durch elektrische Impulse und ein externes Magnetfeld lässt sich das bewegliche Metallgitter ansteuern. So kann sehr schnell zwischen wenig und viel Wölbung hin- und hergeschaltet werden. Die Wissenschafter vergleichen das Prinzip in ihrer Arbeit mit der Bewegung, die der Körper eines Geparden beim Laufen vollzieht.
Je nach Beschaffenheit der Oberfläche, auf der sich der "weiche Roboter" bewegt, erreichen Systeme, bei denen der Bewegungsimpuls über einen angeschlossenen Kontakt von außen übertragen wird, erstaunliche Geschwindigkeiten, von bis zu 70 Körperlängen der Struktur pro Sekunde. Zum Vergleich: Ein Formel 1-Auto schafft um die 50 Körperlängen in der Sekunde. Auch auf einer glatten Glasoberfläche kommt das System mit speziellen Füßen "extrem gut" voran, so Kaltenbrunner gegenüber der APA: "Wir waren überrascht, wie schnell diese kleinen Roboter sein können." Bisher hätten solche weiche Aktuatoren als "cool, aber nicht schnell" gegolten. Diese Ansicht wollte man ändern, so der Forscher.
Auch schwimmend komme man nun auf knapp fünf Körperlängen pro Sekunde. Prototypen autonomer Systeme, bei denen die Technik für die Bewegungssteuerung huckepack aufmontiert ist, schaffen in etwa zwei Längen pro Sekunde, berichten die Wissenschafter. Ebenso demonstriert hat das Team das Überwinden von Hindernissen durch Sprünge oder das Tragen von kleineren Lasten, die durch einen zweiten ähnlichen Bauteil am Rücken des Ersten auch gezielt abgeworfen werden. Darüber hinaus kann der Mini-Roboter zum Richtungswechsel veranlasst werden.
Der Aufbau mit Batterie und Co am Rücken hat es den Forschern besonders angetan. Ein solches System, das energieautonom funktioniert, habe es zuvor noch nie gegeben. Das ist wichtig, weil "der große Traum" darin besteht, dass solche Mini-Robotersysteme vielleicht einmal mehr oder weniger eigenständig zum Beispiel kleine Operationen im Körper durchführen oder Wirkstoffe ganz gezielt dort ausschütten, wo sie gebraucht werden. Im nächsten Schritt müsse man sie mit Sensoren ausstatten, damit sie ihre Umwelt auch wahrnehmen können, erklärte Kaltenbrunner.
OE24 TV Live-Stream
OE24 TV Live-Stream
Fehler im Artikel gefunden?Jetzt melden